
- С чего всё началось
- 1 iso11898-2 или can-high speed.
- 2 iso11898-3 или can-low speed или faut tolerant can
- 3 single wire can или sw-can
- В будущем
- Виды can-шин
- Всё вместе
- Для работы с can шиной автомобиля необходимо знать:
- Зачем нужна в машине can-шина
- Интеграция
- Как подключиться и сделать диагностику автомобиля
- Неисправности
- Плюсы и минусы встроенных шин
- Принцип работы
- Работа с can шиной автомобиля, или решение нестандартных задач (lexus lx570).
- Реализации can на уровне электрических сигналов
- Сегментация can шины по функциональному назначению
- Скорости работы can шины
- Схема и место расположения кан-интерфейса
- Функциональность
- Шина can
С чего всё началось
Сначала я решил добавить фронтальную камеру в свой 2021 Chevrolet Cruze. Поскольку у автомобиля уже есть заводская камера заднего вида, то на высоком уровне нужно было выяснить две вещи:
- Способ передачи видео с фронтальной камеры, которую я добавлю.
- Способ отображения на экране картинки с камеры заднего вида в любое время.
Видеочасть была простой. Из предыдущего опыта я знал, что можно сделать видеомикшер на реле.
Запуск на экране оказался более сложным, и после некоторого расследования я пришёл к выводу, что машина должна подавать сигнал от камеры заднего вида на экран через какую-то шину данных.
1 iso11898-2 или can-high speed.
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом.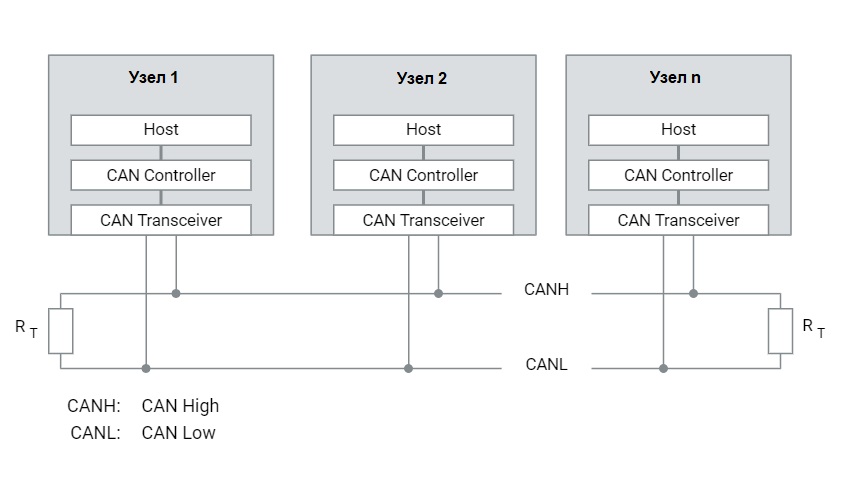
В этом случае уровни на шине CAN выглядят так: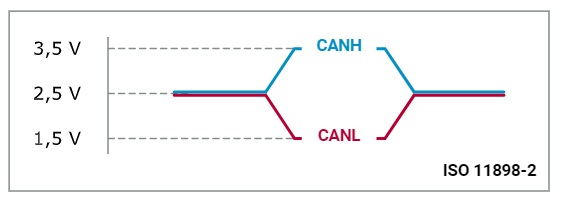
В этом случае уровни на шине CAN выглядят так:
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбитс и выше. (Но могут быть исключения) .
2 iso11898-3 или can-low speed или faut tolerant can
В этом варианте используется та же витая пара, но линии CAN-Low и CAN-High подтянуты к напряжению питания и массе соответственно.
Подробное описание FT-CAN по ссылке
Подробнее в нашей статье о FT-CAN – ссылка.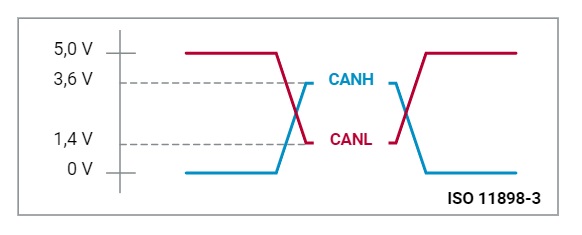
Подробнее в нашей статье о FT-CAN – ссылка.
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети СалонКомфортМультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
3 single wire can или sw-can
Однопроводный вариант шины CAN. Работает на скорости 33.333 кбитс
Используется специальный тип трансиверов. Для того что бы подключиться к такому варианту шины CAN необходимо линию CAN-High анализатора подключить к шине SW-CAN а линию CAN-Low к массеземле.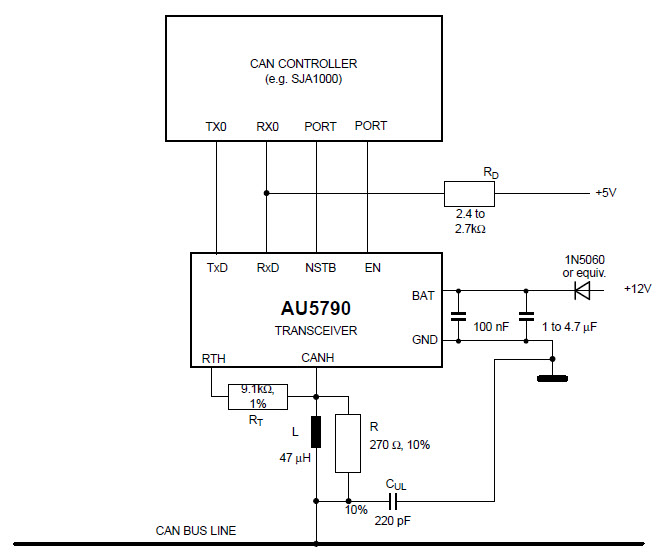
В будущем
В будущем я планирую написать углублённый учебник о том, как добавить дополнительную функциональность к существующим кнопкам в вашем автомобиле, используя бесплатное программное обеспечение и компоненты.
Виды can-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Всё вместе
Наконец настал день, когда я увидел результаты. Хотя нужно ещё повозиться с таймингом, но было приятно видеть, что модуль корректно работает.
Включение/выключение режима парковки, включение/выключение фронтальной камеры, автоматическое переключение на камеру заднего вида и автоматическое переключение обратно
В целом, этот опыт меня многому научил и открыл глаза на возможности интеграции непосредственно с шиной CAN. Довольно удивительно, чего можно достичь соединением по двум проводам.
Для работы с can шиной автомобиля необходимо знать:
CAN шина – это сеть обмена данными определенная в стандарте ISO 11898. Другие каналы обмена данными в автомобиле не могут быть названы CAN шиной. AVC-LAN, BEAN, J1708, VAN и другие старые протоколы это НЕ CAN !
В автомобиле может быть более одной CAN шины. Для каждого функционального сегмента автомобиля выделяется своя сеть CAN. Выделенные сети могут работать на разных скоростях.
Зачем нужна в машине can-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
По теме:Как работает автопилот в современных автомобилях
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Интеграция
Цель состояла в том, чтобы перепроектировать вызов камеры заднего вида. Для этого с включённым снифером я повёл машину задним ходом, чтобы она включила дисплей, а затем несколько раз попробовал парковаться. На протяжении всего этого процесса я заметил один ID с сообщениями, которые последовательно имитировали мои действия.
Тогда я припарковался и через Pcan View попытался передать то же самое сообщение, которое я видел, когда включался и выключался дисплей. В мгновение ока я уже взаимодействовал с шиной.
Передача сообщения через PCAN
Впрочем, я не планировал постоянно ездить с ноутбуком. Нужен был способ автоматизировать эти функции — и здесь пригодилась Arduino. Возможность напрямую получать питание 12V в сочетании с большим количеством ресурсов и поддержки в интернете сделала этот выбор очевидным.
В дополнение к Arduino для завершения проекта мне понадобилось два компонента: модуль CAN и модуль реле. По сути, Arduino — это мозг, запускающий и выполняющий код. Модуль CAN предоставляет возможность взаимодействовать с шиной данных, а реле обеспечивает питание фронтальной камеры, а также действует как видеомикшер между ней и камерой заднего вида.

Модуль mcp2515 (сверху), Arduino Uno (посередине), модуль реле (снизу)
После добавления и настройки соответствующих библиотек Arduino установил связь с автомобилем.
Прослушивание трафика через Arduino
Поскольку я уже знал, что могу запустить дисплей, то начал думать о том, КАК это сделать. Первоначальная идея состояла в том, чтобы установить на панели специальную кнопку мгновенного вызова, но я начал думать: «А что ЕЩЁ в сети можно использовать в качестве триггера?»
В ходе экспериментов я обнаружил, что по шине GMLAN также передаются сообщения с ID, соответствующим кнопке «Отмена круиз-контроля». Это было идеально, потому что круиз-контроль включается на скоростях более 65 км/ч, когда я буду использовать переднюю камеру, а на скоростях ниже 15 км/ч будет включаться камера заднего вида, чтобы помочь с парковкой, так что они никогда не будут перекрываться. После написания некоторого кода я смог заставить Arduino распознать, когда нажимается кнопка отмены круиз-контроля.
Распознавание однократного нажатия кнопки
Однако я не хотел, чтобы камера активировалась каждый раз, когда я отменяю круиз-контроль, поэтому я решил, что лучший подход — превратить её (по сути) в многофункциональную кнопку. Камера активируется только в том случае, если кнопка «дважды нажата».
После долгого уикенда изучения функции millis и отладки кода я успешно запрограммировал распознавание двойного нажатия.
Распознавание двойного нажатия
И когда я привязал его к своим командам для управления дисплеем, у меня собралась довольно крутая небольшая утилита.
Двойное нажатие команды
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Работа с can шиной автомобиля, или решение нестандартных задач (lexus lx570).
Всем привет!
Уже несколько месяцев назад сменил место работы, на радость всем тем, кому не нравилась тема Smart-ов.
Сейчас я, по большей части, занимаюсь мультимедиа авто. Но, в последнее время, часто стали появляться нестандартные задачи, которые требуют разработки электроники. Одна из таких задач — Lexus LX570.
На этот автомобиль уже был установлен управляемый выхлоп. Управляемый выхлоп поставили ему в одной из организаций Москвы. Выхлоп сделан на высшем уровне в плане механических работ. Выхлоп классно выглядит и звучит. Из-под порога торчит двустволка, в штатном режиме она не громче стока, а в открытом режиме выдает сочный рев настоящего V8.
Но то, что не нравится владельцу – это управление этим выхлопом. В работе использовалось стандартное решение, которое подходит под все автомобили. Это брелок с двумя кнопками, одна открывает, другая закрывает выхлоп.
По этому ID идет следующая информация
80 20 00 00 00 00 87 18 – Sport
80 20 00 00 00 00 85 20 – Sport
80 20 00 00 00 00 04 00 — Normal
80 20 00 00 00 00 04 38 – Customize
80 20 00 00 00 00 06 28 – Comfort
80 20 00 00 00 01 04 30 – Eco
Из этих данных видно, что информация о режиме лежит в байтах D6, D7, то есть в последних двух.
Данные передаются в двоичной форме, переведем последние 2 байта в двоичную систему счисления, получится следующее:
10000111 00011000 Sport
10000101 00100000 Sport
00000100 00000000 normal
00000100 00111000 Custom
00000110 00101000 Comfort
00000100 00110000 Eco
Отсюда видно, что в спорт режимах старший и младший биты байта D6 стоят в 1, тогда как в остальных режимах там 0. На них и будем ориентироваться при написании алгоритма.
Тут начинается самое сложное, надо будет объяснить Canny 7 что нужно делать. Для программирования Canny 7 используется своя среда разработки Canny lab. Программирование ведется с помощью специальных диаграмм. Надо расставить логические блоки и выставить между ними связи.
Такой вид программирования хорош тем, что ниже порог входа в разработку, отрицательной стороной является то, что сложные диаграммы будет проблематично читать, так же в них можно запутаться и они занимают много места на экране ПК.
Этот способ программирования мне не привычен и не удобен. В дальнейшем я планирую использовать для подобных прототипов Ардуино совместимые платы с CAN модулем. Но данное решение привлекает тем, что тут все на одной плате. Не нужно ставить дополнительные модули с CANом, не нужно думать с питанием (у Arduino входное напряжение ограничено 12 вольтами, а на современных авто напряжение может повышаться до 15) и не нужно думать о корпусе.
Готовая диаграмма для Canny 7 выглядит следующим образом:
Данная диаграмма и ее тестирование отняло почти 2 дня времени. В конце тестов появляется полностью работоспособное устройство, готовое к установке в авто.
Ну а работу устройства можно посмотреть в видео.
А всем, кто дочитал до конца большое спасибо. Вообще около недели думал, стоит ли выкладывать такую подробную инструкцию с кучей технических моментов и большим объемом технической информации, так как пикабу, все-таки, больше развлекательный сайт.
Скорее всего дальнейшие статьи будут с меньшим объемом технической информации.
Реализации can на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
Сегментация can шины по функциональному назначению
- Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) .
- В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса.
- Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях.
- ВАЖНО: На многих автомобилях (особенно VAG, MB, BMW) CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея, поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем гейтвеем оборудованы автомобили японских марок с 2021..2021 годов в зависимости от модели.
- ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
Скорости работы can шины
CAN на разных автомобилях и в разных сегментах сети может работать на разных скоростях.
Названия сегментов сети: Мотор, Шасси, Комфорт, Салон – условны! У Каждого автопроизводителя свои названия этих участков сети!
- Группа VAG: Моторшасси – 500 кбитс, Комфорт – 100 кбитс и с 2021 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- BMW: МоторШасси – 500кбитс, Комфорт – 100 кбитс и с 2021 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- Mercedes-Benz: МоторШасси – 500 кбитс, Комфорт 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Ford, Mazda: МоторШасси – 500 кбитс, Комфорт 125 кбитс. (Для Ford может быть больше вариантов)
- KIAHyundai: МоторШасси – 500 кбитс, Комфорт 125 кбитс, 500 кбитс, Мультимедиа: 125 кбитс, 500 кбитс., Диагностика: 500 кбитс.
- GM: МоторШасси – 500 кбитс, Комфорт: 33.333 кбитс, 95.2 кбитс, Диагностика: 500 кбитс.
- Toyota, Nissan, Honda, Subaru, Suzuki: 500 кбитс (может использоваться гейтвей)
- Mitsubishi: МоторШасси: 500 кбитс, СалонКомфорт – 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Volvo: МоторШасси: 500 кбитс, СалонКомфорт – 500 кбитс, 125 кбитс, Диагностика: 500 кбитс.
- Renault: 500 кбитс
- Peugeot: МоторШасси – 500 кбитс, Комфорт 125 кбитс.
- Lada: 500 кбитс
- Коммерческая и специальная техника: Стандарт J1939 250 или 500 кбитс.
Схема и место расположения кан-интерфейса
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.
Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Функциональность
Теперь у меня была возможность включать и выключать дисплей, но оставалась одна проблема — что насчёт камеры заднего вида? Мне нужно было, чтобы они с фронтальной камерой работали вместе, словно их так настроили на заводе.
На блок-схеме я изобразил, как я это представляю.
Я быстро понял, что для такой системы нужно в любой момент времени знать состояние трёх переменных:
Не имея опыта программирования, это было очень сложно сделать, и я всё свободное время думал о разных подходах.
В конце концов, я добился успеха!
Активный мониторинг
Теперь я смог реализовать операционную логику, которая контролирует реле.
Управление через реле
На протяжении всего процесса я всё больше узнавал об Arduino и заметил, что версия Nano способна делать всё, что нужно, при этом у неё меньший размер и более низкая цена. Она идеально подходит для постоянной установки в автомобиль. Я разработал модель и распечатал на 3D-принтере корпус для размещения компонентов в качестве компактного блока для установки.
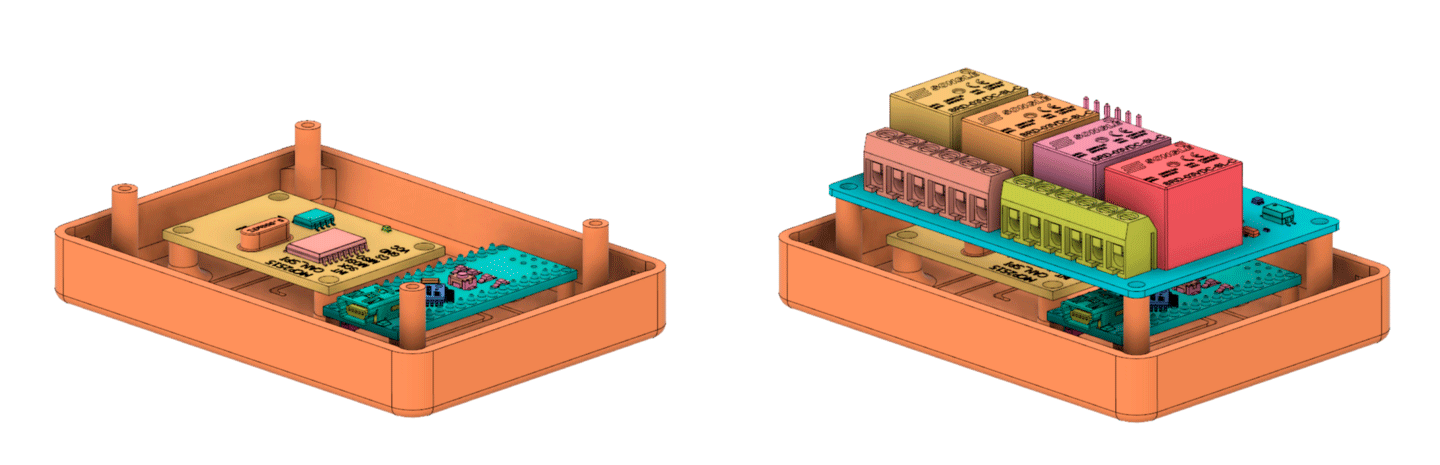
3D корпус
Шина can
У Chevrolet две разные шины данных. Первая — это стандартная CAN, быстрая (500 Кбит/с) и надёжная, она используется для критических данных. Вторая — то, что GM называет LAN (GMLAN), более старая и медленная шина (33,3 Кбит/с), которая используется для данных, не связанных с безопасностью.
Мне нужен был способ прослушивать трафик по CAN, то есть снифер. Для этой цели невероятно полезно устройство PCAN.

Peak Can
Peak Can (PCAN) представляет собой USB-устройство, способное перехватывать и передавать сообщения. Благодаря программному обеспечению Pcan View можно начинать работу без особого обучения.
Поскольку камера заднего вида менее важна для безопасности, чем другие компоненты, я предположил, что искомые данные, скорее всего, будут на шине GMLAN.
Самая простая точка доступа — разъём OBD2. Я подключил Peak Can к шине GMLAN, запустил программное обеспечение — и сразу началось прослушивание трафика.


